Приколы, юмор, анекдоты, фото, картинки, все самое смешное и интересное только здесь!
IMPASS - гибридный "колесоногий" робот

Инженеры, создающие роботов, долго ломали головы над решением проблемы передвижения роботов по неровным поверхностям. Самое простое средство передвижения — колесо — подходит только для более менее ровных маршрутов, а ноги слишком сложны конструктивно. Но выпускники американского университета Virginia Tech похоже нашли решение этой проблемы – они разработали гибридное средство передвижения для роботов, сочетающее в себе лучшие стороны ноги и колеса.
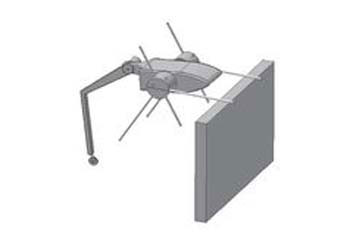
Прототип «колесоного» робота назван IMPASS и может передвигаться по неструктурированной поверхности с помощью шести втягивающихся и выдвигающихся спиц, расположенных на двух колесах.
В зависимости от высоты препятствия спицы либо выдвигаются, либо втягиваются, при этом робот остается на одной и той же высоте от поверхности. Датчики и сенсоры на спицах позволяют роботу не только перешагивать небольшие препятствия, но и забираться по ступенькам или по наклонной поверхности.
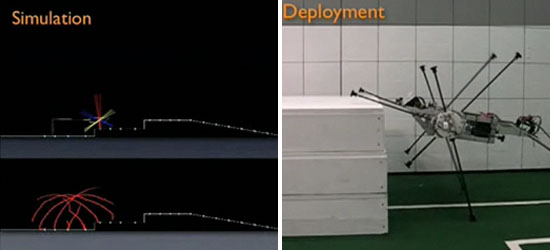
Разработка IMPASS проходила в три этапа: компьютерное моделирование, разработка модели движущихся частей и создание действующего прототипа. Созданный в единственном экземпляре прототип пока не отличается высокой скоростью передвижения, но его разработчики планируют в ближайшем будущем его доработать.
Комментарии (0)
RSS свернуть / развернутьТолько зарегистрированные и авторизованные пользователи могут оставлять комментарии.